1 · Mission Context
CubeSats released from launch vehicles typically begin
their operational life with substantial angular velocity.
Deployment springs and separation dynamics introduce
rotational disturbances that must be damped before
precision attitude control can begin.
Small satellites frequently rely on magnetorquers for
initial detumbling. By interacting with the Earth's
magnetic field these coils generate torques that
dissipate rotational kinetic energy.
The objective of this project is to construct a
numerical simulation environment capable of evaluating
the performance of a magnetic B-Dot detumbling controller.
2 · Spacecraft Attitude Dynamics
The rotational dynamics of the spacecraft are governed
by Euler's rigid body equation.
\[
J\dot{\omega} + \omega \times (J\omega) = \tau
\]
where
- \(J\) — inertia tensor
- \(\omega\) — angular velocity vector
- \(\tau\) — total external torque
The net torque acting on the spacecraft includes both
magnetic control torque and gravity gradient disturbance.
\[
\tau = \tau_{mag} + \tau_{gg}
\]
3 · Orbit Propagation
The spacecraft orbit is propagated using the classical
two-body gravitational model.
\[
\dot r = v
\]
\[
\dot v = -\frac{\mu}{r^3}r
\]
where the gravitational parameter of Earth is
\[
\mu = 3.986004418 \times 10^{14} \; m^3/s^2
\]
4 · Magnetic Field Model
Magnetorquer actuation relies on the interaction between
the spacecraft magnetic dipole and the Earth's magnetic field.
In this simulation the magnetic field is approximated
using a dipole model.
\[
B =
\frac{\mu_0}{4\pi r^3}
\left[
3(\hat m \cdot \hat r)\hat r - \hat m
\right]
\]
Typical field magnitudes in low Earth orbit range between
25 and 60 microtesla.
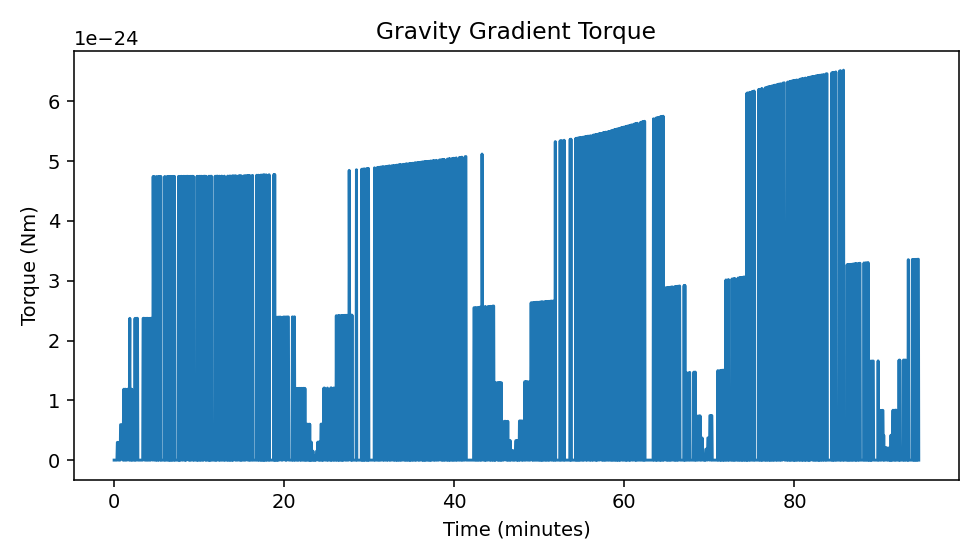
5 · Gravity Gradient Disturbance
Because Earth’s gravitational field varies across the
spacecraft structure, a restoring torque arises whenever
the spacecraft inertia axes are misaligned with the
radial direction.
\[
\tau_{gg} =
\frac{3\mu}{r^5}(r \times Jr)
\]
6 · B-Dot Control Law
The B-Dot controller commands a magnetic dipole moment
that opposes the time derivative of the measured
magnetic field.
The magnetic field rate is approximated using the
spacecraft angular velocity.
\[
\dot B \approx -\omega \times B
\]
The control law becomes
\[
m = -k \dot B
\]
In this project a bang-bang implementation is used.
\[
m = -m_{max} \; sign(\dot B)
\]
7 · Simulation Implementation
The spacecraft dynamics and control law are integrated
using the SciPy ODE solver. Each subsystem of the
simulation corresponds directly to the governing
equations described earlier.
Orbit Dynamics
def orbit_dynamics(t,state):
r = state[0:3]
v = state[3:6]
r_norm = np.linalg.norm(r)
a = -mu * r / r_norm**3
return np.hstack((v,a))
This function implements the two-body gravitational
equations of motion.
B-Dot Controller
bdot = -np.cross(w,B)
m = -m_max * np.sign(bdot)
The cross product approximates the magnetic field
time derivative. The commanded dipole moment is
then saturated to the maximum magnetorquer capability.
8 · Detumbling Performance
Simulation results show that the B-Dot controller
gradually dissipates rotational kinetic energy,
reducing the spacecraft angular velocity over
approximately one orbital period.
References
- Wertz, J. R. — Spacecraft Attitude Determination and Control
- Markley & Crassidis — Fundamentals of Spacecraft Attitude Determination
- Psiaki, M. — Magnetic Attitude Control of Satellites
- NASA Guidance Navigation and Control Handbook